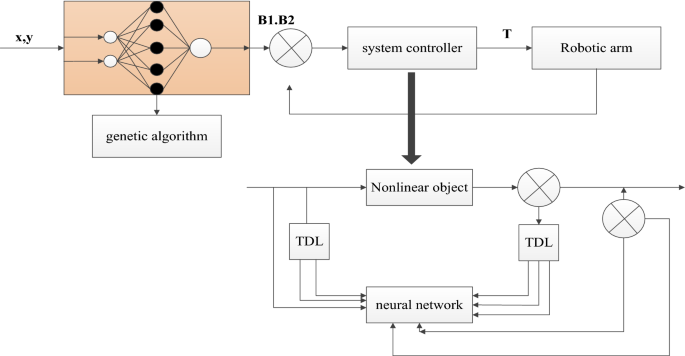
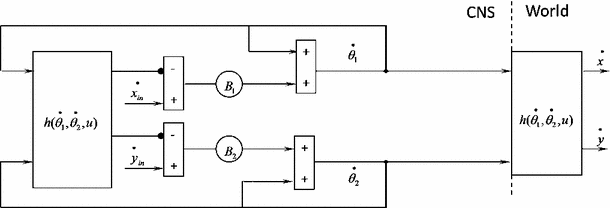
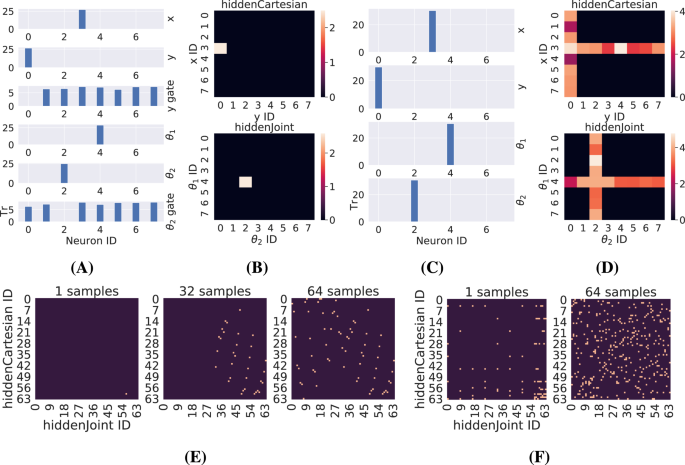
Neural controller learning the inverse kinematics of the arm of fig.1
Von einem Mystery-Man-Autor
Last updated 06 Juni 2024

Download scientific diagram | Neural controller learning the inverse kinematics of the arm of fig.1 in the framework of auto-imitation. See text for more information from publication: Motor control and movement optimization learned by combining auto-imitative and genetic algorithms. | In sensorimotor behaviour often a great movement execution variability is combined with a relatively low error in reaching the intended goal. This phenomenon can especially be observed if the limb chain under regard has redundant degrees of freedom. Such a redundancy, | Movements, Motor Control and Genetic Algorithm | ResearchGate, the professional network for scientists.

CPREDICTION OF INVERSE KINEMATICS SOLUTION OF A REDUNDANT
Inverse kinematics solution of Robotics based on neural network
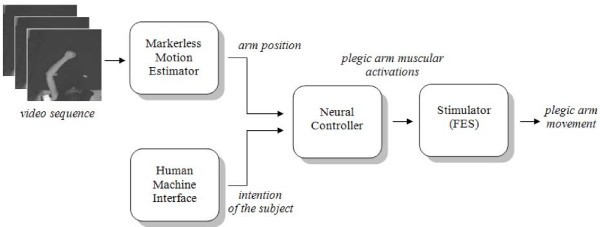
A neural tracking and motor control approach to improve
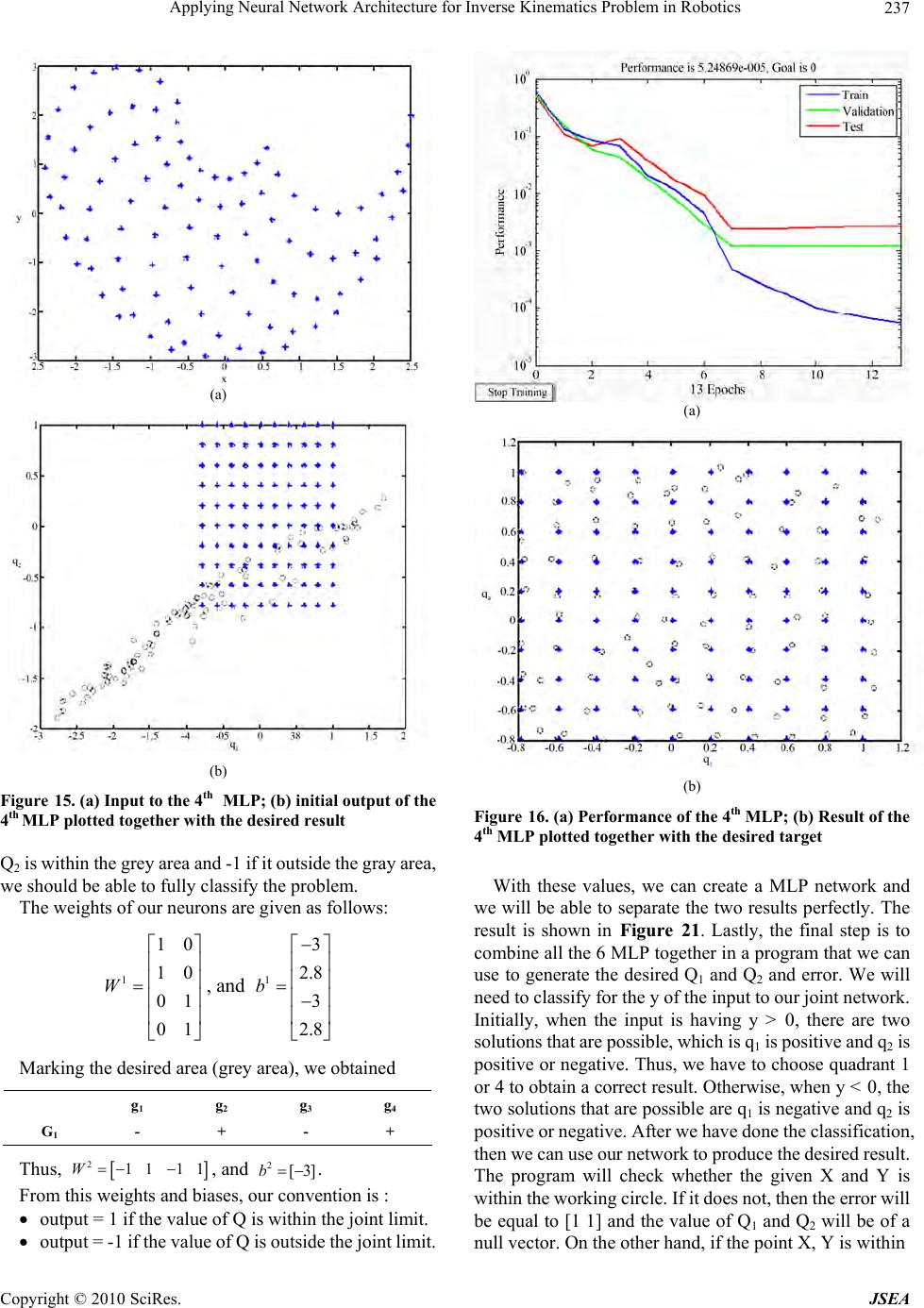
Applying Neural Network Architecture for Inverse Kinematics

Sensors, Free Full-Text
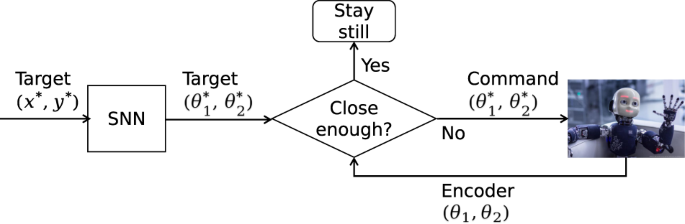
Learning inverse kinematics using neural computational primitives

Solution of the inverse kinematic problem. A planar arm with three

(PDF) Inverse kinematic analysis of 4 DOF pick and place arm robot
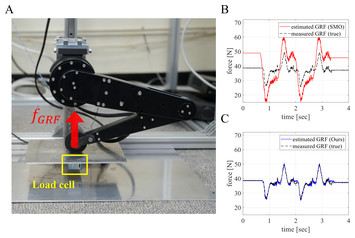
Artificial neural network-based ground reaction force estimation

A Learning Framework to inverse kinematics of high DOF redundant
Cerebellum-inspired neural network solution of the inverse

An Adaptive Neural Network Learning-based Solution for the Inverse
Learning inverse kinematics using neural computational primitives
Customizing skills for assistive robotic manipulators, an inverse
für dich empfohlen
 LED Middle Finger Sign for Car, Truck, Thank You Light, Thumb Up Down Light, Cool Car Interior Light to Express Yourself, Cool Funny Car Accessories14 Jul 2023
LED Middle Finger Sign for Car, Truck, Thank You Light, Thumb Up Down Light, Cool Car Interior Light to Express Yourself, Cool Funny Car Accessories14 Jul 2023 Lustiges Auto-Finger-Licht mit Remote Road Rage Sign Mittelfinger Gesture-Light14 Jul 2023
Lustiges Auto-Finger-Licht mit Remote Road Rage Sign Mittelfinger Gesture-Light14 Jul 2023 Mittelfinger LED-Schilderleuchte Auto LED-Licht Lustiges Finger in Bayern - Weidenbach, Tuning & Styling Anzeigen14 Jul 2023
Mittelfinger LED-Schilderleuchte Auto LED-Licht Lustiges Finger in Bayern - Weidenbach, Tuning & Styling Anzeigen14 Jul 2023 FLIK Original Middle Finger Light - Give The Bird & Wave to Drivers14 Jul 2023
FLIK Original Middle Finger Light - Give The Bird & Wave to Drivers14 Jul 2023- Silva Performance Auto - The Drivemocion LED Car Sign lets everyone in traffic know how you're REALLY feeling! File this under: Must have 😍😍14 Jul 2023
- The FLIK14 Jul 2023
 Mittelfinger Auto Licht, 2023 Neue 3 Formen Lustige LED Auto Led Zeichen mit Fernbedienung Hand Geste Licht für Auto, Spaß Auto Finger Licht Auto Gadgets & Road Rage Zeichen Auto Zubehör:14 Jul 2023
Mittelfinger Auto Licht, 2023 Neue 3 Formen Lustige LED Auto Led Zeichen mit Fernbedienung Hand Geste Licht für Auto, Spaß Auto Finger Licht Auto Gadgets & Road Rage Zeichen Auto Zubehör:14 Jul 2023 Mittelfinger-Auto-Licht, LED-Auto-Hand, LED-Auto-Finger hoch, Give The Love Bird Wave Road Rage Signs, Auto-LED-Aufkleber mit Fernbedienung günstig kaufen — Preis, kostenloser Versand, echte Bewertungen mit Fotos — Joom14 Jul 2023
Mittelfinger-Auto-Licht, LED-Auto-Hand, LED-Auto-Finger hoch, Give The Love Bird Wave Road Rage Signs, Auto-LED-Aufkleber mit Fernbedienung günstig kaufen — Preis, kostenloser Versand, echte Bewertungen mit Fotos — Joom14 Jul 2023 Amposei Middle Finger Gesture Light with Remote, Middle Finger Car Light, Truck Accessories, Funny Car Accessories for Men, Ideal Gifted Car Stuff14 Jul 2023
Amposei Middle Finger Gesture Light with Remote, Middle Finger Car Light, Truck Accessories, Funny Car Accessories for Men, Ideal Gifted Car Stuff14 Jul 2023 Verhängnisvolle Handzeichen beim Autofahren14 Jul 2023
Verhängnisvolle Handzeichen beim Autofahren14 Jul 2023


Sie können auch mögen
 Druckluft Fanfare Marine Hupe Nebelhorn 2 Klang 12 Volt 140 DB14 Jul 2023
Druckluft Fanfare Marine Hupe Nebelhorn 2 Klang 12 Volt 140 DB14 Jul 2023 Solar energy, Definition, Uses, Advantages, & Facts14 Jul 2023
Solar energy, Definition, Uses, Advantages, & Facts14 Jul 2023 Baby Swings Prime R Matt- Manual Baby Cradle | Ghodiyu | Crib | Swing | Jhula – Buy Baby Care Products14 Jul 2023
Baby Swings Prime R Matt- Manual Baby Cradle | Ghodiyu | Crib | Swing | Jhula – Buy Baby Care Products14 Jul 2023 Outdoor LED Sign Board at low Price in Agra, Uttar Pradesh, India with Product Specification14 Jul 2023
Outdoor LED Sign Board at low Price in Agra, Uttar Pradesh, India with Product Specification14 Jul 2023 Wallbox im Freien aufstellen14 Jul 2023
Wallbox im Freien aufstellen14 Jul 2023 Colour Mill - Rust - Oil Based Colour 20ml14 Jul 2023
Colour Mill - Rust - Oil Based Colour 20ml14 Jul 2023 18mm Rückfahrkamera fahrzeugspezifische Kamera unauffällig integriert in der Kennzeichenbeleuchtung Nummernschildbeleuchtung für Jeep Compass Wrangler14 Jul 2023
18mm Rückfahrkamera fahrzeugspezifische Kamera unauffällig integriert in der Kennzeichenbeleuchtung Nummernschildbeleuchtung für Jeep Compass Wrangler14 Jul 2023.png) Türdichtung links Türdichtungen VW Bus T2 T2a T2b 68-79 Bulli T2 Dichtung OEM VEWIB Deutsche Qualität - Aircooledshop14 Jul 2023
Türdichtung links Türdichtungen VW Bus T2 T2a T2b 68-79 Bulli T2 Dichtung OEM VEWIB Deutsche Qualität - Aircooledshop14 Jul 2023 Rückenkissen Sitzkissen Schwangerschaft von feela in Niedersachsen - Hohnhorst14 Jul 2023
Rückenkissen Sitzkissen Schwangerschaft von feela in Niedersachsen - Hohnhorst14 Jul 2023 Schnellkupplung KFZ Klimaanlage 134A LP/HP14 Jul 2023
Schnellkupplung KFZ Klimaanlage 134A LP/HP14 Jul 2023